この記事では、Arduinoマイコン、パソコン(Python)、シリアル通信用いて、RCサーボの角度制御を行う方法をソースコード付きで解説します。
シリアル通信でRCサーボの制御(Python版)
RCサーボを制御するにはPWM波と呼ばれる信号を送る必要があります。
この方式をPWM制御といいます。
前回はシリアルモニターでシリアル通信をおこないましたが、
今回はPythonでシリアル通信をおこない、RCサーボの制御をしました。
回路構成(配線図)
Arduinoと電子部品の構成・配線は下記の通りです。
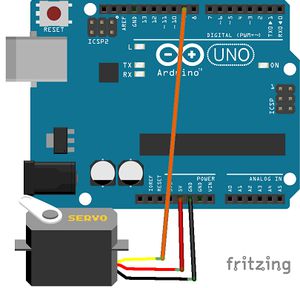
【電子部品】
・Arduino UNO (1個)
・RCサーボ S03R 2BBMG (1個)
・ジャンパワイヤー(数本)
処理手順
実装したプログラムの処理手順は下記の通りです。
【Arduino側】
①Servoオブジェクトを宣言する(servo1)
②PWM制御信号を送る出力ピンを設定する(9番ピン)
③シリアルポートを9600 bps[ビット/秒]で初期化する
④シリアル通信で受信したデータを数値に変換する
⑤取得した数値だけRCサーボを回転させる
⑥3~5の処理を繰り返す
【Python側】
①Arduinoと接続しているCOMポート番号を指定する(ここでは7)
②シリアルポートを9600 bps[ビット/秒]で初期化する
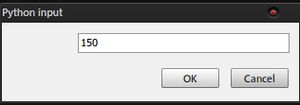
③回転角の入力待機をする
④得られた回転角と終端文字をシリアル通信でArduinoに送信する
⑤eが入力されるまで3~4の処理を繰り返す
ソースコード
サンプルプログラムのソースコードは下記の通りです。
【Arduino側】
【パソコン側(Python)】
実行結果
サンプルプログラムの実行結果は下記の通りです。
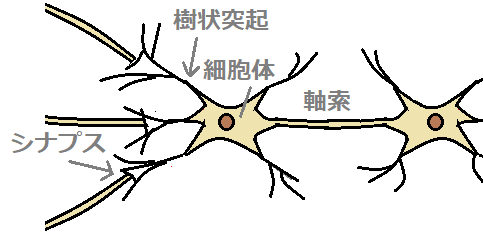
ニューラルネットワークとは?基本原理と活性化関数、単純パーセプトロンについて徹底解説
ニューラルネットワークとは?基本原理と活性化関数、単純パーセプトロンについてまとめました。ニューラルネットワークとは脳内には、ニューロン(神経細胞)が無数にあります。ニューロン同士はシナプスで繋がっています。入力される電気信号の電位がある閾...
algorithm.joho.info

301 Moved Permanently
algorithm.joho.info

コメント
すみません、サンプルのソースコードが見れないんのですが。対応していただけませんでしょうか。
遅くなりましたが、修正致しました。